|
This past summer I had the opportunity to work for computer science PhD candidate Ryo Suzuki under the guidance of Tom Yeh of the computer science department. My task was developing printed circuit boards for experiments for human computer interaction (HCI). The goal was to create a surface which a magnet could be moved to create patterns, animations, display information and alerts. Below is an image of the coil array, dispersed on 4 layers. This allows for tighter resolution. By having over lapping coils, the magnet could be pulsed and moved in less discrete steps. The further the coils are apart, the more discrete each position appears, resulting in less smooth transitions, and increased current to attract the magnet from point A to point B. 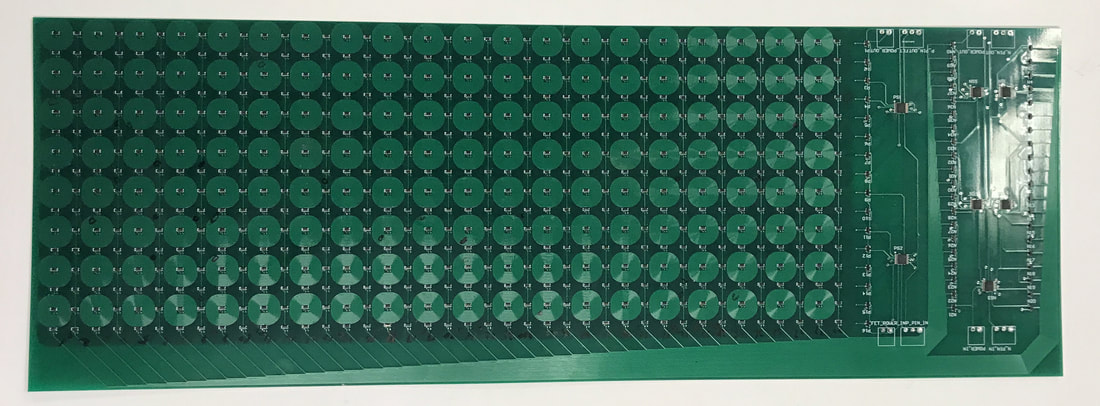 Final PCB, one of 4 used in the HCI experiments. Designed by Kevin Kuwata and Ryo Suzuki
3 Comments
This is the final project for ECEN1400: Introduction to Digital and Analog with Professor Alex Fosidck at University of Colorado at Boulder (Spring 2017). The goal of this project was to make a ball full of sensors which could detect changes in its environment and alert its operator. The ball consists of a custom printed circuit board based on the Atmega328p micro controller interfacing with analog and digital input sensors and output sensors.  PIR sensor, IR Beam Break circuit, LED notification List of functional sensors:
Breadboard We each developed code for each of the sensors individually so that we could learn about the entire system. After breadboarding the bare minimum circuits we attempted to combine sensing circuits to get an idea of how the polling of the sensors would be required to be written. 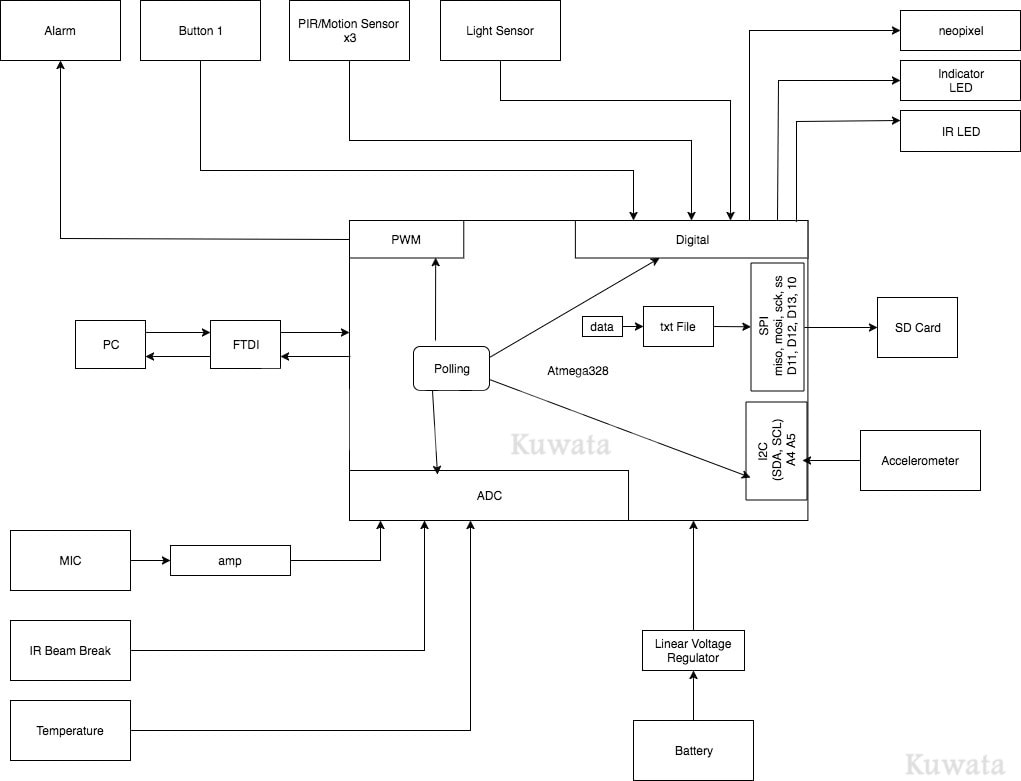 Flow diagram for software and hardware. Code The code was developed using Arduino utilizing the following libraries: Wire (for the accelerometer) and the Adafruit Neopixel library. Example code for the accelerometer found here was used as the basis to get raw data from the accelerometer. Logic was created around the accelerometer and gyroscope data to determine if motion was induced on our ball. All other code was created with no additional libraries and purely utilizing analog and digitalReads. The ball was developed to determine an average of all individual sensor data at initial startup and trigger an alarm if any of the sensors measured a change greater than a threshold. The thresholds of each sensor were determine experimentally by testing the individual sensors in various environments. For the majority of the sensors, if a change was greater than a specified value the alarm would be triggered. To prevent the sensors from constantly triggering an alarm in the event the environment changes significantly when the ball was first activated, a software re-initialization of the sensor averages was implemented. We felt that this would be useful in the event that the ball is set up in the morning and as the sun sets we would not want the ball to constantly trigger simply from a slow environmental change. This reset was accomplished by iterating a counter value and once a number of iterations of the main loop had been executed the ball would re-initialize the average values for the sensors. Because the Atmega is unable to read multiple pins simultaneously code was created in such a way to poll the individual pins. We decided to implement a polling method to read sensor data instead of using an interrupt driven system. This was due to the fact that we had too many types of sensors to make use of the three different interrupt routines that could be used to trigger events. With the polling implementation we figured that the sensors would not take longer than 10 ms to read therefore the values would be updated faster than a human could react. We felt that the polling procedure would be adequate in determining human interaction. Git old and new. Testing: https://drive.google.com/open?id=0B6UPt8IL98yZbFhEcU9LSjhlX3c PCB Design This was my first circuit board board ever and was was created using EagleCad. It was heavily influenced by the arduino nano board layout. This was done for two reasons. One, the nano provides a well known and well experimented with board layout. Two, the nano’s compact size allowed us to use as a backup if the atmega failed to be boot loaded and programed. The header pins in the center of the board was an intentional backup plan to provide us access to the sensors in the event of failure of the micro controller. They were ultimately unnecessary. Particular care was taken while routing the FTDI signals. It was important to keep traces short, limit number of bends, and create a differential paris for the RX and TX lines. It was also important to match the FTDI231XS capacitors of 47pF exactly to allow for FTDI to be recognized by my computer. I followed the sample schematic found on page 23 of the datasheet: Self Powered Configuration. In addition to this schematic I followed a schematic provided by Professor Fosdick. The majority of the schematics used to create my circuit board were found in the sample schematics in the data sheets of individual sensors as well as the circuit board schematics provided by Sparkfun. This was very convenient but resulted in an issue here or there that was resolved with PCB re-work with 30 awg wire. 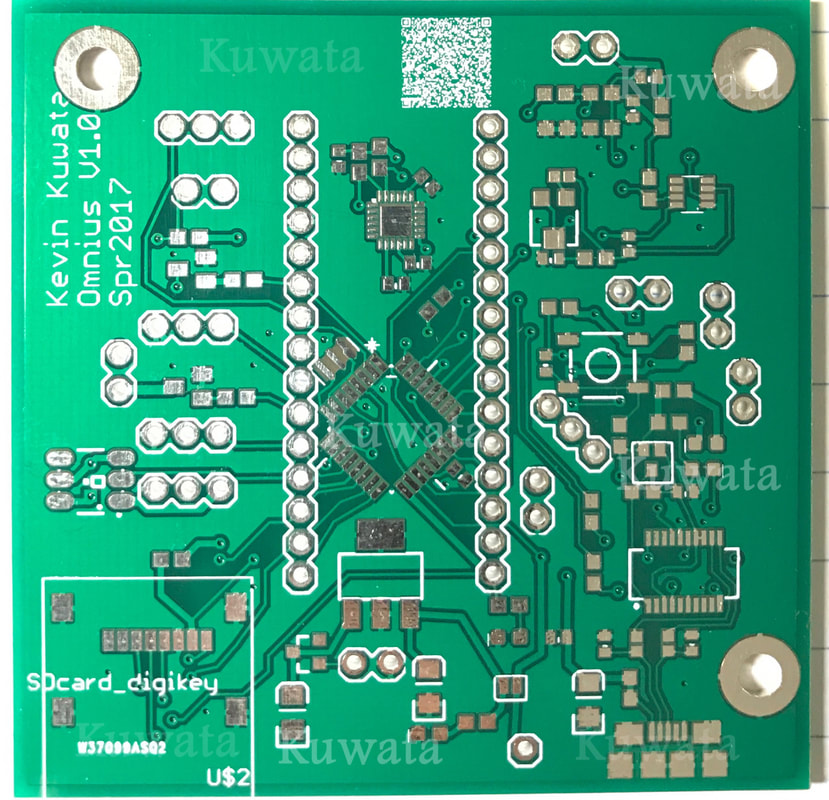 Header pins down center of board as a failsafe, so that an arduino Nano could be used if all things failed. PCB Re-Work The first issue with the board was the power regulators, 3.3V and 5V as they had the incorrect footprint. I used the footprint of an SOT223 that had the order of the pins different than the part actually in hand. This was corrected by using hook up wire. I accidentally wired the reset of the FTDI chip a pulled down instead of a pulled up. This resulted in the inability to properly initialize boot loading for the micro controller. I observed that code could be uploaded with a properly timed reset of the Atmega prior to arduino sketch upload. I also noted that I could see the FTDI chip listed in my serial devices connected. I was able to serve my issue by correctly cutting a single trace and pulling up the DTR line. This can be seen in the re-worked board below in the bottom right quadrant of the board. I re-examined my schematic of the FTDI chip and found my mistake. Additional rework was required for the MPU-6050 to function properly. I initially based my schematic on the a sample schematic available here provided by Sparkfun. After failing to get data out of the accelerometer and checking for an I2C device using the “I2C” Scanner example sketch that the device was not being properly addressed. Re-examining the official data sheet on page 22 Figure 7.2 I was able to identify my issue. The MPU-6050 has the ability to share I2C lines with 2 different addresses: 0x68 and 0x69. The 0x68 is the default for the software library used and is implemented in hardware by setting AD0 (pin 9) to ground. I was able to fix this by wiring the 9th pin to ground. I compared the Sparkfun schematic to the one in the data sheet and found that the V_Logic pin (pin 8) also needs to be held high at 3.3v to establish the logic level for the MPU-6050. Without this the device sets the outputs to be V_Logic which was initially tied to ground through a 10 nF capacitor. Unfortunately the micro SD card was not fixed in time. The major flaw with the SD card reader was the wrong footprint and pin assignments. I made a custom footprint and flipped horizontally and mirrored the footprint therefore giving totally wrong pins. In addition, I managed to assign the pins 1 position to the left resulting in a unusable footprint. I was able to verify that the SPI lines were correctly turning on the quad buffer giving 3.3v at the correct pads. 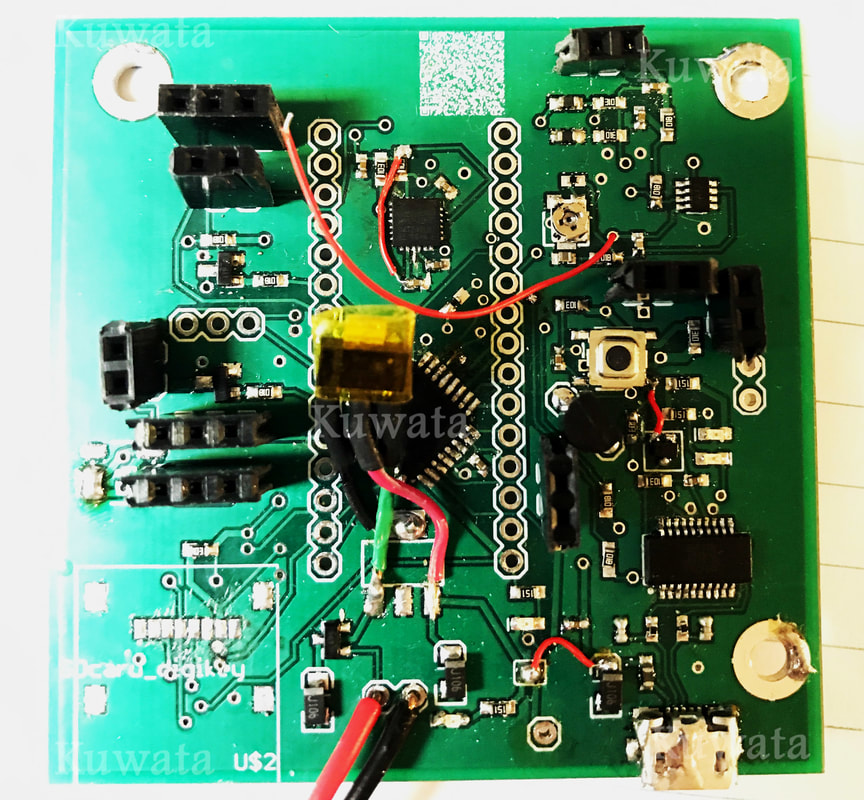 Only had a few fixes to make and the board worked! Daughter Boards Daughter boards for the PIR, photo resistor, button, buzzer, neopixel, and IR emitter/diode were created on one sided copper clad with the toner transfer method. This was an excellent opportunity to learn how to rapidly produce boards to prototype new board layouts without waiting more than a day for feedback on a design. 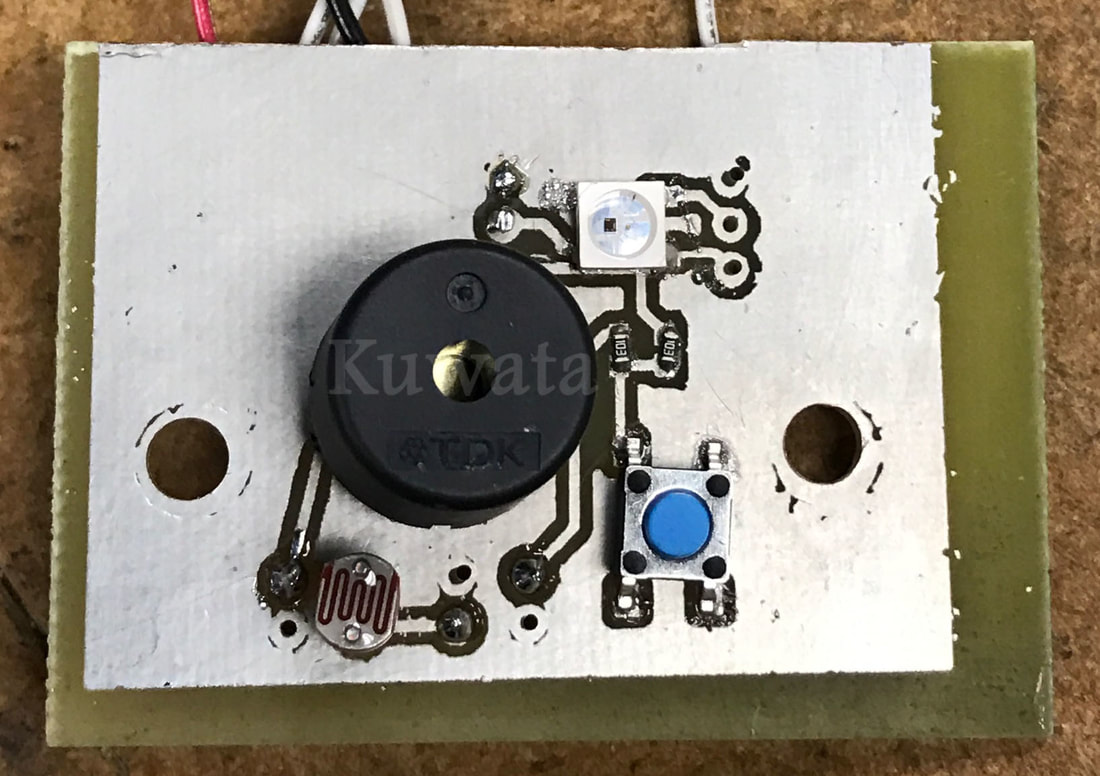 Etched in Tim May's Lab of the ITLL. Enclosure The enclosure of the ball was modeled by Labon Hillberry in OnShape. I 3d printed the enclosure at .6mm layer height in black PLA (instead of PETg) to increase speeds to reduce printing time. The overall printing took over 14 hours on an i3 Hictop FDM printer. Due to the low quality resulting form the 0.6mm layer heights on a 0.8mm nozzle and high speeds, the ball was outsourced to a local company and printed in ABS. If I were to re-do the print I would reduce layer height and not print faster than 50mm/s.  A failed 3d print on my personal printer. Testing: Link We won! Our team won best project for the morning lab section for Alex Fosdick’s ECEN1400 class.  Labon, David, Kevin (Me) |